

Parallel Robot
- Description: A parallel robot is a type of robot that connects a moving platform and a stationary platform through two or more independent motion branches. The multi-degree-of-freedom motion of the moving platform is achieved by controlling the motion of each branch. Its structural feature is that multiple driving devices drive an actuator in parallel.
- Advantages: It has high stiffness and high precision. Since multiple branches jointly support the moving platform,

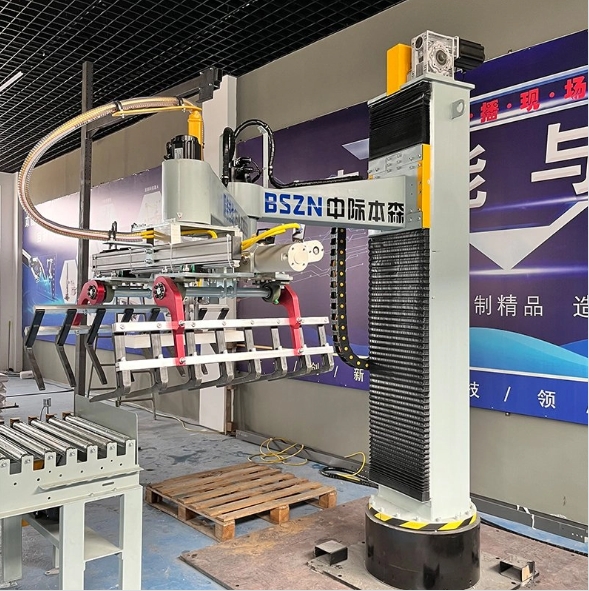
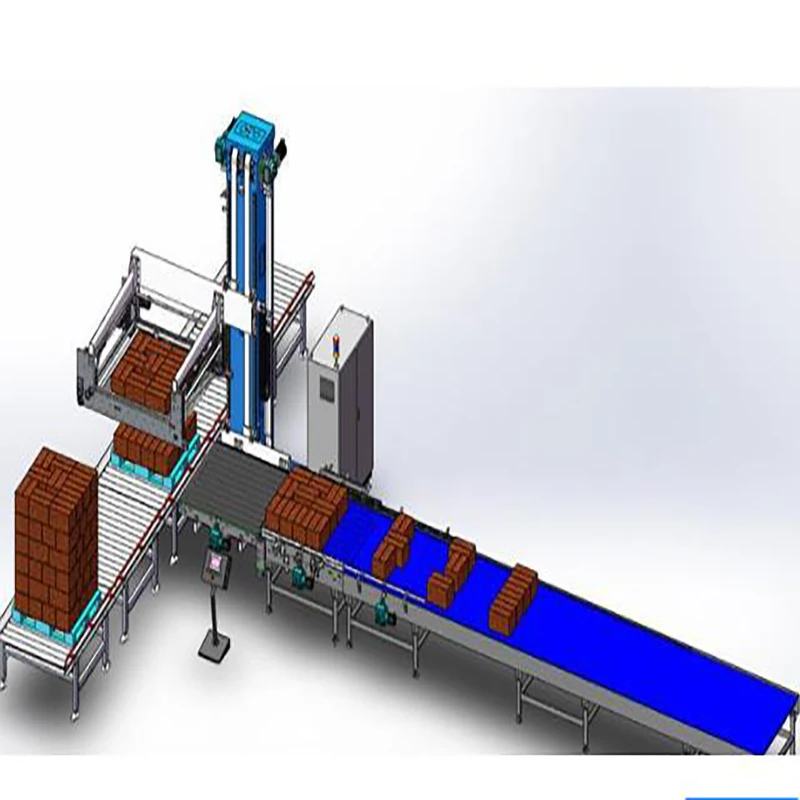
The column palletizer is a compact, space-saving automated palletizing machine....
2025-04-27

As a manufacturer of fully automatic organic fertilizer machinery robots, Benson...
2025-06-29

The 15 - kilogram canned goods vertical stacking robot, the 10 - kilogram chili ...
2025-06-29

The 50-kg intelligent control carton column palletizing robot, high-speed 25-kg ...
2025-06-28
The 15 - kilogram rice vertical palletizing machine packaging production line ca...
2025-06-27

The small 20 - kilogram flour vertical - column palletizing robot is specificall...
2025-06-27

The vertical feed stacker is a key equipment for achieving automation and intell...
2025-06-15
Thegantry - type high - level palletizer, with its stable and robust structure, ...
2025-06-14
Parallel robot, parallel manipulator and parallel spider hand
- Description: A parallel robot is a type of robot that connects a moving platform and a stationary platform through two or more independent motion branches. The multi-degree-of-freedom motion of the moving platform is achieved by controlling the motion of each branch. Its structural feature is that multiple driving devices drive an actuator in parallel.
- Advantages: It has high stiffness and high precision. Since multiple branches jointly support the moving platform, it can effectively resist external force deformation; it has a high movement speed and small inertia, enabling rapid action response; it has a relatively large carrying capacity and can carry objects of different weights according to the structural design; it has a compact structure and occupies a small space, making it suitable for some working environments with limited space.
Parallel robot, parallel manipulator and parallel spider hand
- Description: It is a specific application form of a parallel robot, mainly used for operations such as grasping, handling, and assembly. It drives the end effector (such as a gripper, etc.) through multiple parallel motion chains to achieve precise actions.
- Advantages: It has a high repeat positioning accuracy and can accurately complete various operation tasks; it is flexible in movement and can achieve various posture adjustments within the working space; it has a fast response speed, which improves production efficiency; due to its structural characteristics, it has strong adaptability to the environment and can work in some complex environments.
Parallel robot, parallel manipulator and parallel spider hand
- Description: It is usually designed by imitating the leg structure of a spider. It is composed of multiple parallel motion branches, and the "finger" part at the end can perform flexible grasping actions. It is often used in situations that require fine operations and rapid responses.
- Advantages: It is agile in action and can quickly capture and process target objects; it has good flexibility and adaptability and can adapt to grasping objects of different shapes and sizes; it has a unique structure and has good operability in some special working scenarios (such as narrow spaces or complex terrains); multiple branches work in coordination, which can provide a large grasping force and stability.




Product Description






















Product Inquiry