

The multi-jointed machine is similar to a human arm and is characterized by its ability to move flexibly like a human hand. For example, when encountering an obstacle, the multi-joint robot can bypass the obstacle to reach the target, which is difficult for the general polar or cylindrical coordinate type industrial robot. If some special movements (crank motion) are required to be completed, the multi-joint robot is also easier to complete. A multi-jointed robot can also move from one point to

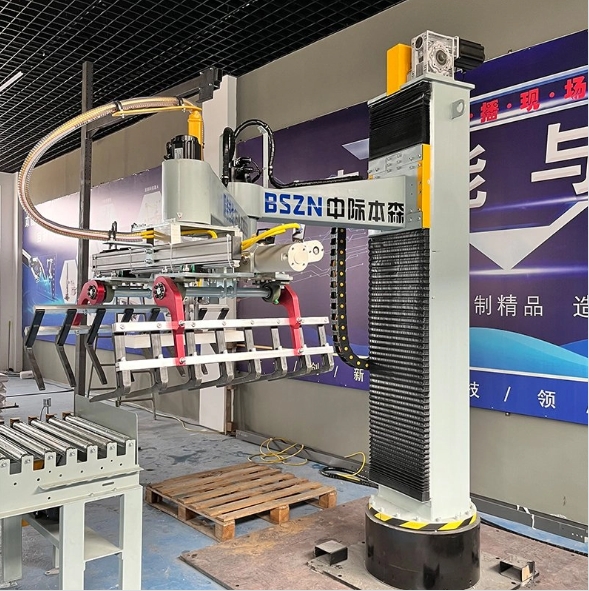
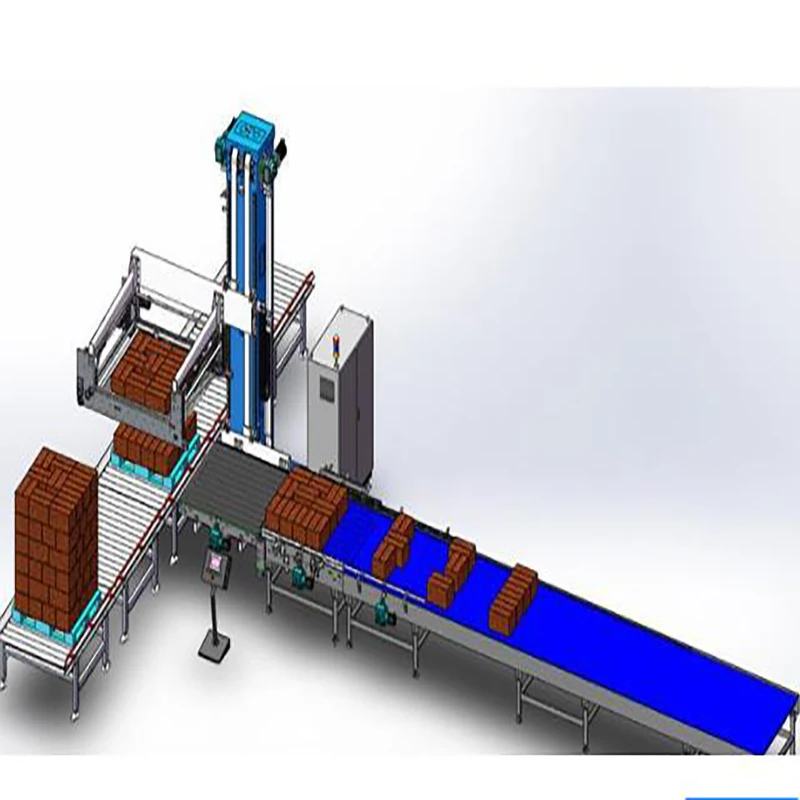
The column palletizer is a compact, space-saving automated palletizing machine....
2025-04-27

As a manufacturer of fully automatic organic fertilizer machinery robots, Benson...
2025-06-29

The 15 - kilogram canned goods vertical stacking robot, the 10 - kilogram chili ...
2025-06-29

The 50-kg intelligent control carton column palletizing robot, high-speed 25-kg ...
2025-06-28
The 15 - kilogram rice vertical palletizing machine packaging production line ca...
2025-06-27

The small 20 - kilogram flour vertical - column palletizing robot is specificall...
2025-06-27

The vertical feed stacker is a key equipment for achieving automation and intell...
2025-06-15
Thegantry - type high - level palletizer, with its stable and robust structure, ...
2025-06-14
Product descriptions from the supplier
Video Description
Other attributes
| packaging type | Cartons, CANS, Barrel, Stand-up Pouch, Bags, Film, case |
| warranty | 1 Year |
| Weight (KG) | 2000 |
| automatic grade | Automatic |
| driven type | Electric & Mechanical |
| place of origin | Shandong, China |
| brand name | BENSON |
| dimension(l*w*h) | 2250*2250*3890 |
| key selling points | Easy to Operate |
| machinery test report | Provided |
| video outgoing-inspection | Provided |
| core components | motor, PLC, Other, Pressure vessel, Engine |
| Product name | FANUC Robot Palletizer |
| Function | Bag /case/caeton/bottle palletizing |
| Speed | 800-1200bags/h |
| Certification | CE Certfication |
| Material | Carton Steel |
| Weight | 2000 kg |
Packaging and delivery
| Selling units | Single item |
| Single package size | 25X25X55 cm |
| Single gross weight | 50.000 kg |
MACHINE SHOW

Multifunctional grain joint palletising robot, Advantages:
1. Efficient operation: quickly complete the palletising of bagged grains of different specifications to improve efficiency.
2. Flexible adaptation: Compatible with a variety of cereal categories, no need for frequent adjustment.
3. Precise positioning: the joint action is accurate, and the palletising is neat and stable.
4. Cost reduction and labour saving: reduce labour, reduce labour and management costs.
5. Easy to operate: intelligent control, easy to use, saving training time.
6. Convenient maintenance: reasonable structural design, simple troubleshooting and maintenance.
| Brand | FANUC |
| Palletizer speed | 800~1200 bags/h |
| Workable bag weights | from 1 to 50 kg |
| Stacking Type | 5/6/7/8/9/10 bags per layer or customized |
| Voltage | 380 V 50 HZ or Customized |
| Working Temperature | -20~50℃ |
| Operating system | PLC |
| Application | bags, cases, boxes, bottles, barrels |

PRODUCT DETAILS






MACHINE COMPONENTS

COMPANY PROFILE

BENSON Intelligent Equipment (Shandong) Co., Ltd. is a modern high-tech enterprise, focusing on the research and development of industrial robots, palletizing robots, palletizers, high-position palletizers, fully automatic bagging packaging machines, packaging machines, batching equipment, depalletizers, loaders, logistics automation lines and other projects. The company has brought together a group of high-level and high-quality professionals. The company actively promotes the development model of “production, learning and research” and has successfully developed a new generation of automated production lines that can be widely used in automated packaging and automated logistics engineering. Its capabilities and various technical indicators are at a high level. In order to comprehensively improve its market competitiveness, the company has selected a large number of high-quality accessories from the United States, Japan, Europe and other countries, and introduced various advanced processing equipment to greatly improve the quality of its products. It has been widely used in chemical, feed, flour, building materials, food, beverages, beer, automated logistics and other industries. From product import to output, from electrical control to mechanical structure design, BENSON Intelligent Equipment (Shandong) Co., Ltd. can fully provide system technical solutions and precision manufacturing of equipment. At the same time, we have a complete after-sales service system to provide you with high-quality technical support and after-sales service.
Company Qualifications

Exhibition

PACKAGING & DELIVERY


FAQ
Q1: May I know how long it takes to get the machine after transfer?
A1: Usually, if the machine you need is a standard type, we can ship it within 7 days. Customized types are welcome, and the delivery time is about 20-25 working days. Q2: How long is the product warranty period?
A2: The product warranty period is 12 months. Q3: Can you help me pack other goods together into the container?
A3: Yes, of course. If most of the products are purchased from us, and other products are also purchased from other suppliers, you can ask other suppliers to send the products to our factory (Tai’an City, Shandong Province). We help you pack all your products into one container. Arrange everything. Q4: After the machine is finished, how to check the quality of the machine?
A4: We have made video calls with customers in seminars for on-site inspection on zoom, Microsoft, Teamviewer, whatspp, skype and wechat.







Product Inquiry