

多关节机器类似于人的手臂,其特点是能够像人的手一样灵活移动。例如,当遇到障碍物时,多关节机器人可以绕过障碍物到达目标,这对于一般的极坐标或圆柱坐标型工业机器人来说是困难的。如果需要完成一些特殊的运动(曲柄运动),多关节机器人也更容易完成。多关节机器人也可以从一个点移动到

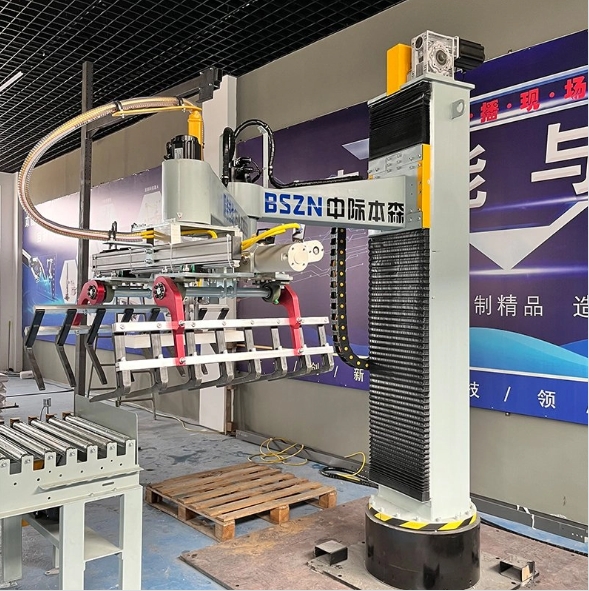
自动搬运纸箱码垛机单臂码垛机1.结构简单,操作简单灵活,结构耐用,故障率低2.占...
2025-04-28

As a manufacturer of fully automatic org...
2025-06-29

The 15 - kilogram canned goods vertical ...
2025-06-29

The 50-kg intelligent control carton col...
2025-06-28
The 15 - kilogram rice vertical palletiz...
2025-06-27

2025-06-27

The vertical feed stacker is a key equip...
2025-06-15
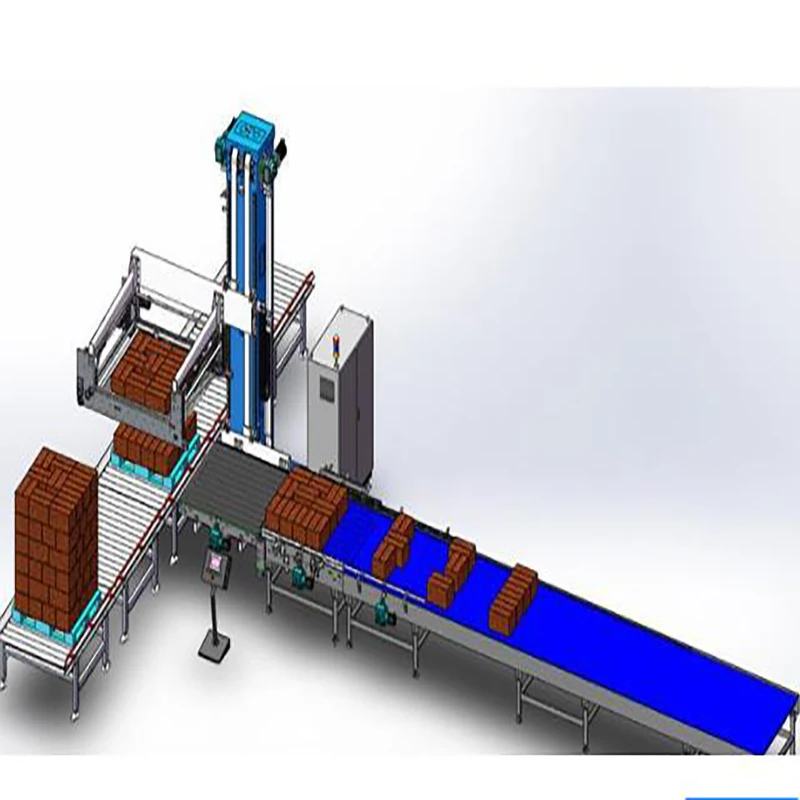
Thegantry - type high - level palletizer...
2025-06-14
当多关节机器人手臂中的一个关节以一定角度旋转时,其他关节及其连杆将在空间中产生运动。相应地,爪子到达一个新的位置,位置的方向(姿态)也发生了变化。因此,一般的多关节机器人需要通过计算机进行控制。机器人在每个关节上都有角度探测器。给定每个关节的旋转角度,获得手爪的空间位置和姿态的问题称为运动控制的分析问题。相反,给定手爪的位置和姿态,每个关节连杆应该旋转多少角度的问题称为运动的综合问题。这些问题的关键是如何利用计算机进行上述变换和计算











产品询价